

 联系我们
联系我们

遨博机器人五大应用的特性
打光的稳定性
工业视觉应用一般分成四大类:定位、测量、检测和识别,其中测量对光照的稳定性要求高,因为光照发生10-20%的变化,测量结果将可能偏差出1-2个像素,导致图像边缘位置发生变化,因此降低环境光的干扰,保证主动照明光源的发光稳定性,是首要解决的问题。
工件位置的不一致性
视觉检测应用中,首先要能找到待测目标物。待测目标物出现在拍摄范围内,尤其是目标物无序出现时,能检测目标物位置,就需要用到定位功能,解决测量结果有较大偏差的问题。

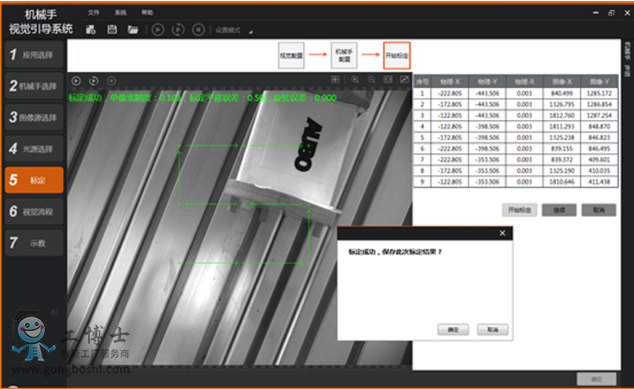
标定
高精度测量时会用到光学畸变标定、投影畸变的标定、物像空间的标定等,需要机器人标定起始位置、运动方向、运动步长,实现机器人自动运动到各个标定位置,获取数据计算标定结果。
物体的运动速度
如果被测量的物体不是静止的,而是在运动状态,那么一定要考虑运动模糊对图像精度(模糊像素=物体运动速度相机曝光时间),这不是单一软件能够解决的。需要视觉与机械臂系统的共同协作。
软件的测量精度
测量应用中软件能够从图像上提取的特征点较少,精度只能按照1/2—1/4个像素考虑,机器视觉的运动速度和测量精度在整个产品中占有重要的位置,运动速度快慢以检测能力是成反比的,因此提高运动精度和检测细节很重要。
更多资讯:遨博机器人
工业视觉应用一般分成四大类:定位、测量、检测和识别,其中测量对光照的稳定性要求高,因为光照发生10-20%的变化,测量结果将可能偏差出1-2个像素,导致图像边缘位置发生变化,因此降低环境光的干扰,保证主动照明光源的发光稳定性,是首要解决的问题。
工件位置的不一致性
视觉检测应用中,首先要能找到待测目标物。待测目标物出现在拍摄范围内,尤其是目标物无序出现时,能检测目标物位置,就需要用到定位功能,解决测量结果有较大偏差的问题。
标定
高精度测量时会用到光学畸变标定、投影畸变的标定、物像空间的标定等,需要机器人标定起始位置、运动方向、运动步长,实现机器人自动运动到各个标定位置,获取数据计算标定结果。
物体的运动速度
如果被测量的物体不是静止的,而是在运动状态,那么一定要考虑运动模糊对图像精度(模糊像素=物体运动速度相机曝光时间),这不是单一软件能够解决的。需要视觉与机械臂系统的共同协作。
软件的测量精度
测量应用中软件能够从图像上提取的特征点较少,精度只能按照1/2—1/4个像素考虑,机器视觉的运动速度和测量精度在整个产品中占有重要的位置,运动速度快慢以检测能力是成反比的,因此提高运动精度和检测细节很重要。
更多资讯:遨博机器人