

 联系我们
联系我们

遨博机器人设备故障无法进入打包姿态处理方法

声明:本媒体部分图片、文章来源于网络
版权归原作者所有,如有侵权,请与我联系删除。
当遨博机器人无法通过示教器转动关节时,我们该如何借助外部电源来转动关节,从而达到我们想要的姿态。
1、准备好一个可调直流稳压电源,M3内六角扳手,镊子;
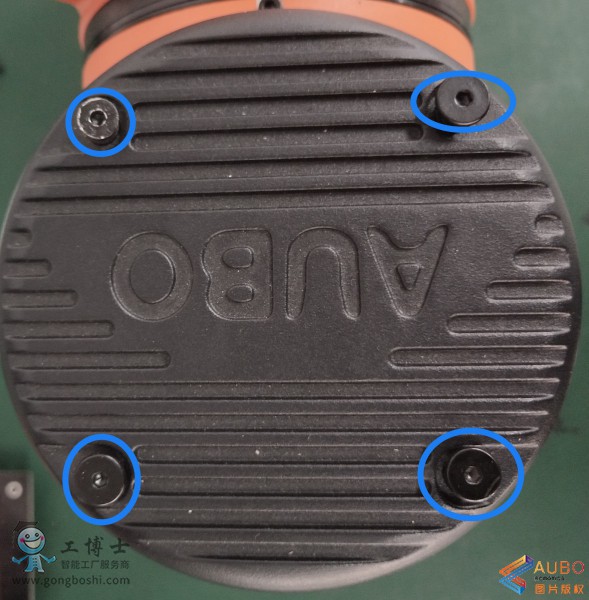
2、用内六角扳手拆开想要转动的关节后盖;
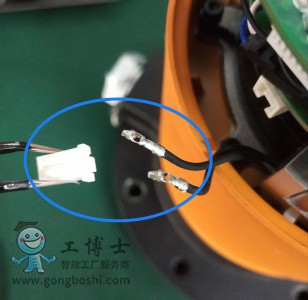
3、用镊子取出遨博机器人的端子壳;

4、再用镊子取出端子壳内端子;
5、将可调直流稳压电源调制18V,1A;

6、将可调直流稳压电源正负两根线接到取出的两根线的端子上;

7、给可调直流稳压电源上电,听到关节发出“哒”的声音,即可转动关节;
8、调整好位置姿态后,断电,将遨博机器人关节复原即可。